单片机控制步进电机程序(含电路原理图和程序)
1、设计电路:
主要元件:与门AND_5(5路),ULN2003A(放大电压用来驱动电机),AT89C52,步进电机MOTOR-STEPPER
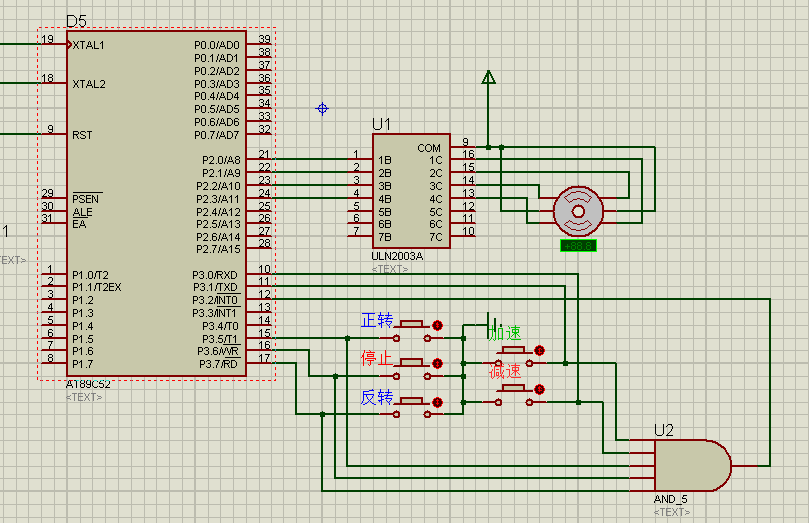

步进电机连接电路图
2、编写程序:
#include
#define uint unsigned int
#define uchar unsigned
#include #define uint unsigned int #define uchar unsigned char int state = 0;
char int state = 0; //定义电机的状态 state = 1 正转 state = -1电机反转 state = 0 电机停止
uint time = 50; //定义延时时间
int step[8]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09};//每一步的通电顺序
//几个控制开关量
sbit drive = P3^5;
sbit stop = P3^6;
sbit re_drive = P3^7;
sbit add = P3^1;
sbit reduce = P3^0;
//延时程序 x*10ms
void Delay_xms(uint x)
{
uint i,j;
for(i=0;i<x;i++)
for(j=0;j<112;j++);//10ms
}
//反转
void Move_reverse(uint time)
{
uint i;
for(i= 0;i < 8;i++)
{
P2 = step[i];
Delay_xms(time);
}
}
//正转
void Move(uint time)
{
int i;
for(i= 7;i >= 0;i--)
{
P2 = step[i];
Delay_xms(time);
}
}
//定义外部中断INT0的中断函数 开关量变化时做出反应
void ChangeState() interrupt 0
{
if(!drive)
{
state = 1;
drive = 1;
}
if(!stop)
{
state = 0;
stop = 1;
}
if(!re_drive)
{
state = -1;
re_drive = 1;
}
if(!add)
{
time -= 10;
add = 1;
if(time <= 10)
time = 10;
}
if(!reduce)
{
time += 10;
reduce = 1;
if(time >= 100)
time = 100;
}
}
void main()
{
EA = 1; //EA (IE.7), CPU中断允许(总允许)位。
EX0 = 1; //EX0(IE.0),外部中断0允许位 IE0(TCON.1),外部中断0中断请求标志位。
IT0 = 1; //定义下降沿触发
while(1)
{
switch(state)
{
case 1: Move(time);
break;
case 0: Delay_xms(10);
break;
case -1: Move_reverse(time);
break;
}
}
}
// 由于编辑器排版问题,没办法做到代码对齐3、运行结果:
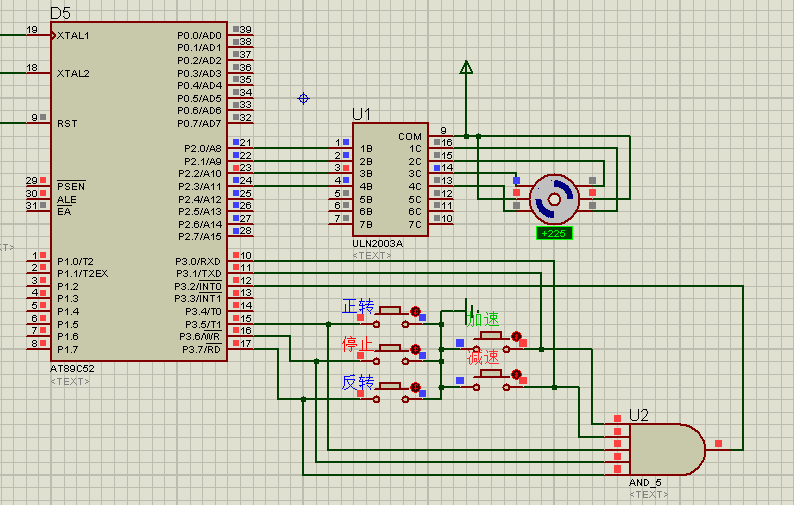
运行结果
相关推荐
-
红米K50Pro用的什么处理器(红米K50Pro配置好吗)
如果是在以前,我们说起红米的时候,可能很多人都会认为红米就是一款入门手机的代表,但是时到今日,红米已经悄悄在提升手机的定位,比如这款红米K50Pro已经有了12GB+512GB的版本,要知道,还有很多旗舰手机都还没有...
-
派出所是属于公安局管的吗(派出所和公安局有什么不一样)
派出所与公安局的区别是:派出所是公安局的下属单位。在中国,派出所依照国家治安管理法规和上级公安机关规定的权限,其主要任务是:坚决贯彻公安工作的路线、方针、政策;同犯罪分子作斗争;防、控各种事故的发生,管...
-
甜到爆的小情话(特别含蓄又有深意的小情话)
1、 你喜欢的未必适合你,在你身边的永远才是最好的,陪伴是最长情的告白,相守是最温暖的承诺。 2、你啊,大抵就是那陈年清酿,那七月急雨,是那词不达意的温柔,是我的心上人,天上月。 3、我吃完了一个五斤的西瓜...
-
大闸蟹怎么判断是不是活的(关于大闸蟹的小知识)
最近已经入秋了,大闸蟹也越来越肥美了,很多人都知道大闸蟹死了之后是不能够继续吃的,那大闸蟹要怎么判断是不是活的呢? 大闸蟹怎么判断是不是活的 看大闸蟹是否会转眼睛和吐泡泡。 1、转眼睛:如果想要判断大闸蟹...
-
在电脑上把手机照片转换成pdf(手机图片怎么在电脑上转换成pdf)
如何将图片免费转成PDF?手机或电脑里的照片太多不仅占用空间,而且查看或传送都不方便,一般都是将照片转成PDF更方便,那么手机或电脑的照片怎么才能免费转成PDF呢? 一、手机端 不管是电脑还是手机端需要打开PDF文...
-
法学专业的就业前景怎么样(法学专业的就业方向有哪些好)
一、发展前景 教育部、中央政法委《关于实施优秀法律人才教育培养计划的若干意见》,提出我国法律教育的目标是培养优秀的法律人才。什么是杰出的法律人才?综上所述,有三个词:一是复合型,二是应用型,三是国际化...